Our mission is to develop robots that help people by engaging them in intelligent, intuitive, and purposeful social interactions. Our work draws from the fields of human-computer interaction (HCI), robotics, and artificial intelligence (AI) and seeks to make a real-world impact in healthcare, education, and the corporate world.
Statement of Purpose
Fostering Human-Robot Rapport to Facilitate Positive and Long-Term Interactions
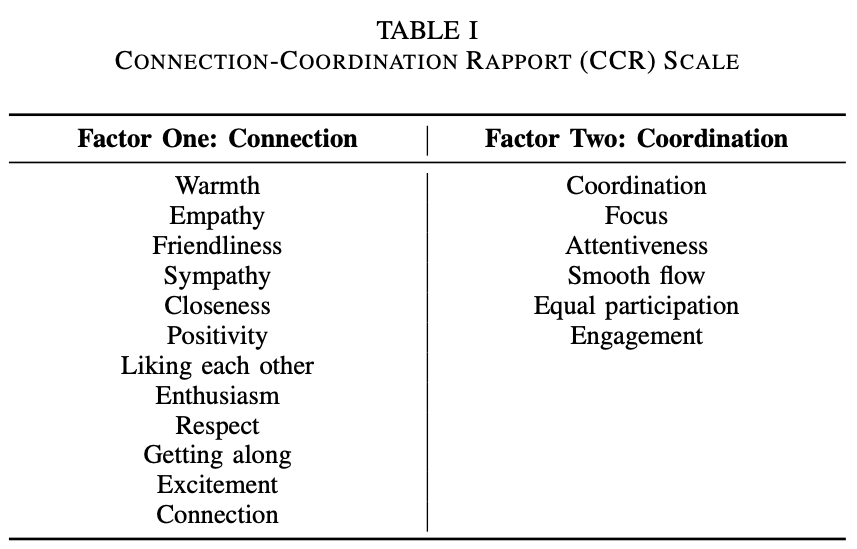
Successful Long-term human-robot interactions will require robots to have the social skills needed to prevent robot abandonment and foster the best user experience possible. We believe a key and important social skill for robots to develop is rapport: a feeling of mutual understanding an interpersonal connection among individual developed through interactions. The work in our lab has sought to define and measure rapport, as well as examine its effects on a variety of human-robot interactions.
Selected Publications
Lin, T. H., Dinner, H., Leung, T. L., Mutlu, B., Trafton, J. G., & Sebo, S. (2025). Connection-Coordination Rapport (CCR) Scale: A Dual-Factor Scale to Measure Human-Robot Rapport. In Proceedings of the 2025 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2025).
Zhang, A. W., Kovacs, C., de Pablo, L., Zhang, J., Bai, M., Jeong, S., & Sebo, S. (2025). Exploring Robot Personality Traits and Their Influence on User Affect and Experience. In Proceedings of the 2025 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2025).
Ng, S., Lin, T. H., Li, Y., & Sebo, S. (2024). Role-Playing with Robot Characters: Increasing User Engagement through Narrative and Gameplay Agency. In Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2024).
Robots as Social Agents: Examining How Factors such as Robot Personality, Customizability, and Autonomy can Influence Human-Robot Interactions
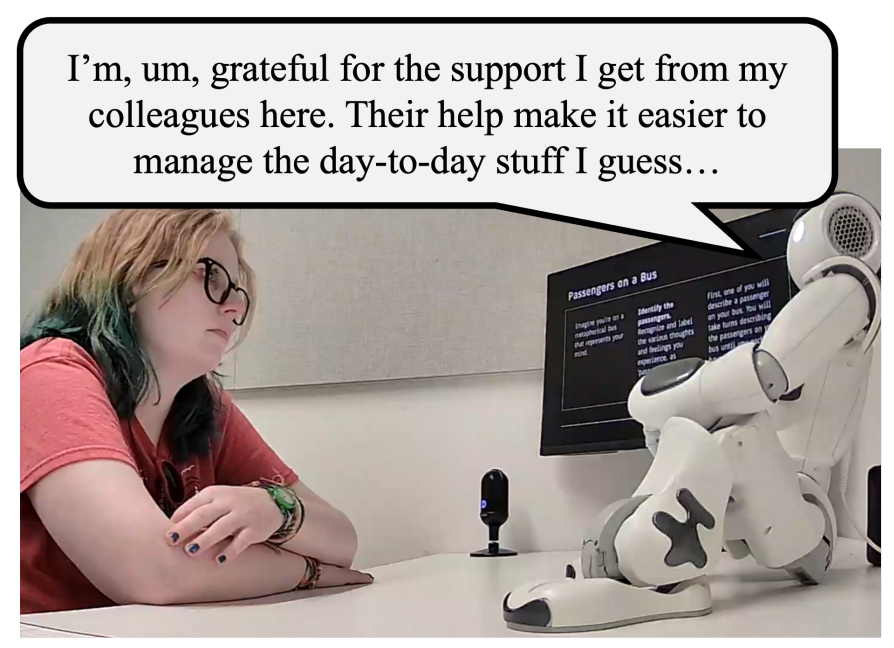
We consider devices such as calculators and microwaves to be "machines" and to not consider them as a "social other". However, social robots engage with people in human-like ways, leading people to perceive them more similar to how we view people and animals - as social agents or "social others". Therefore, robots seem to exist somewhere in between a machine and a human - we believe they can have goals and intentions, however, we do not believe that they can feel love or pain. Our work has explored how giving robots different amounts and types of expression of different attributes (e.g., personality - as shown on the left with a robot high in the neuroticism trait) can influence human-robot interaction. We have also sought to better characterize how people perceive robots as "social others", especially with respect to their perceived autonomy.
Selected Publications
Zhang, A. W., Kovacs, C., de Pablo, L., Zhang, J., Bai, M., Jeong, S., & Sebo, S. (2025). Exploring Robot Personality Traits and Their Influence on User Affect and Experience. In Proceedings of the 2025 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2025).
Zhang, A. W., Queiroz, R., & Sebo, S. (2025). Balancing User Control and Perceived Robot Social Agency through the Design of End-User Robot Programming Interfaces. In Proceedings of the 2025 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2025).
Kim, S., Anthis, J. R., & Sebo, S. (2024). A Taxonomy of Robot Autonomy for Human-Robot Interaction. In Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2024).
Ng, S., Lin, T. H., Li, Y., & Sebo, S. (2024). Role-Playing with Robot Characters: Increasing User Engagement through Narrative and Gameplay Agency. In Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2024).
Erel, H., Vázquez, M., Sebo, S., Salomons, N., Gillet, S., & Scassellati, B. (2024). RoSI: A Model for Predicting Robot Social Influence. In ACM Transactions on Human-Robot Interaction (THRI).
Interaction-Shaping Robotics: Robots that can Shape Human-to-Human Interactions in Groups
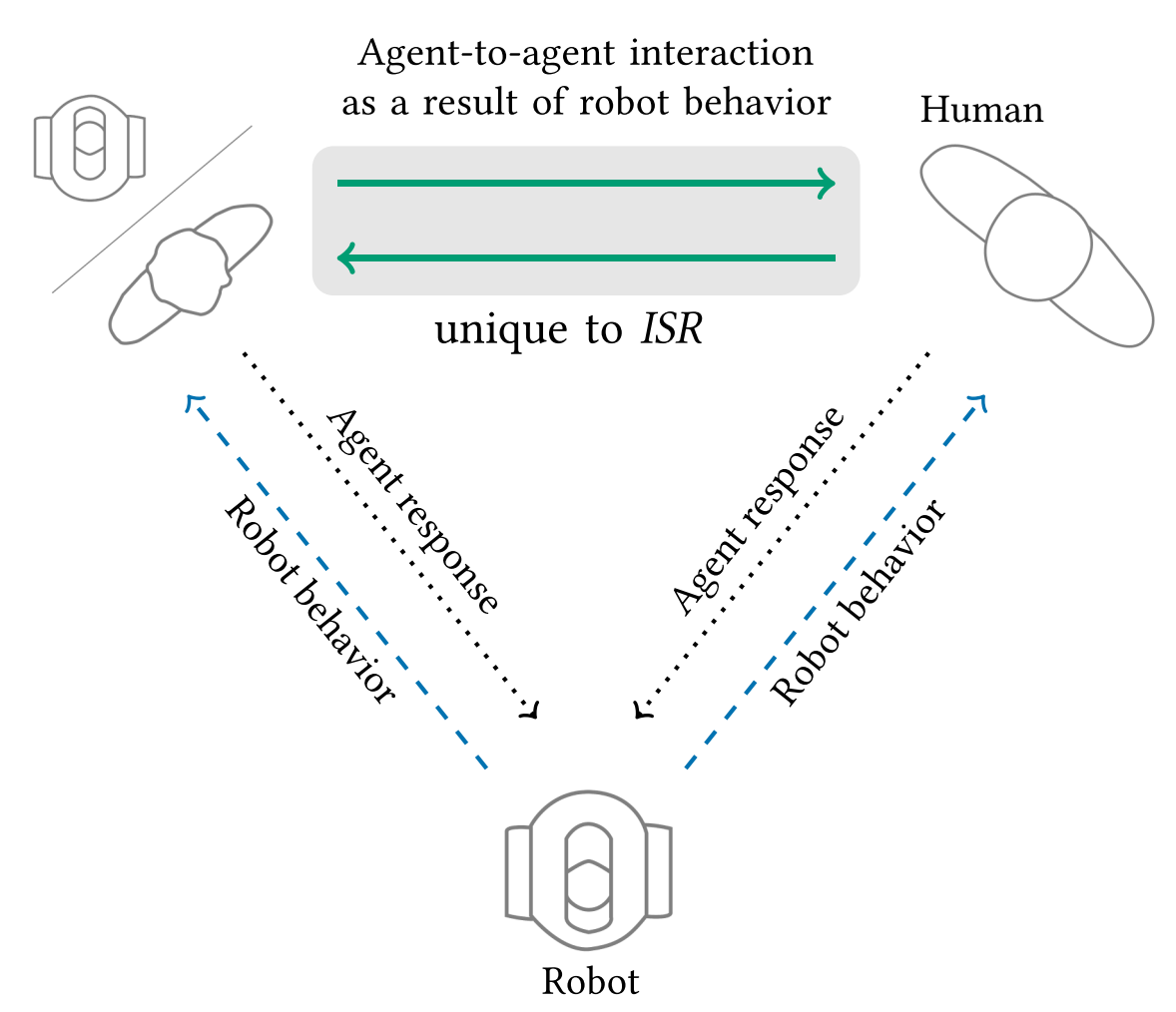
When robots interact with groups of people, their actions not only influence each person directly (human-robot connections) they also can influence other social connections in the group (e.g., other human-human connections). Our work has been among the first to demonstrate that robots can shape human-human interactions. We have shown that robots can improve human-human interactions by sparking conversations between strangers and improving team social dynamics (trust, inclusion, psychological safety). We have also demonstrated the potential for robots to harm human-human connections in groups (e.g., reducing how included group members feel when given a specialized role to interact with a robot). Our work contributes to the goal of showcasing the types of influence robots can have on human-human interactions to help design robots that improve and not harm our social connections.
Selected Publications
Gillet, S., Vázquez, M., Andrist, S., Leite, I., & Sebo, S. (2024). Interaction-Shaping Robotics: Robots that Influence Interactions between Other Agents. In ACM Transactions on Human-Robot Interaction (THRI).
Zhang, A. W., Lin, T. H., Zhao, X., & Sebo, S. (2023). Ice-Breaking Technology: Robots and Computers Can Foster Meaningful Connections between Strangers through In-Person Conversations. In Proceedings of the 2023 CHI Conference on Human Factors in Computing Systems (CHI 2023).
Strohkorb Sebo, S., Dong, L. L., Chang, N., & Scassellati, B. (2020). Strategies for the Inclusion of Human Members within Human-Robot Teams. In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2020).
Sebo, S., Stoll, B., Scassellati, B., & Jung, M. F. (2020). Robots in Groups and Teams: a Literature Review. In Proceedings of the ACM on Human-Computer Interaction (CSCW 2020).
Strohkorb Sebo, S., Traeger, M., Jung, M., & Scassellati, B. (2018). The Ripple Effects of Vulnerability: The Effects of a Robot's Vulnerable Behavior on Trust in Human-Robot Teams. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2018).
Comparing Robots with Humans and other Technologies: Unique Advantages of Interacting with Robots

Why use a robot as opposed to a chatbot, computer screen, or other alternative? Does interacting with a robot provide any benefits to interacting with people? Our work has shown that robots, as opposed to other technological or non-technological alternatives (computer screen, poster on the wall), are more effective at engaging people in deep conversations. We have also shown that people feel less judgement from a robot compared with a person when playing an immersive puzzle game. This work highlights the unique benefits robots might bring to social interactions: increased compliance compared with other technologies and less social judgment compared with people.
Selected Publications
Zhang, A. W., Lin, T. H., Zhao, X., & Sebo, S. (2023). Ice-Breaking Technology: Robots and Computers Can Foster Meaningful Connections between Strangers through In-Person Conversations. In Proceedings of the 2023 CHI Conference on Human Factors in Computing Systems (CHI 2023).
Lin, T. H., Ng, S., & Sebo, S. (2022). Benefits of an Interactive Robot Character in Immersive Puzzle Games. In IEEE International Conference on Robot & Human Interactive Communication (RO-MAN 2022).
Robots for Education
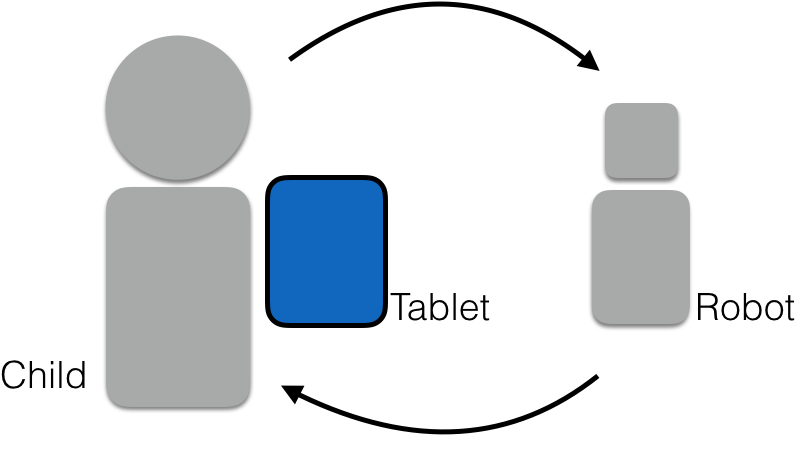
Each student learns differently and requires individualized support to achieve academic success. Robot tutors have emerged as a promising technology that can provide quick feedback and tailored assistance to students, helping them to remain motivated and encouraged in learning tasks. Our work has explored the development of computational frameworks to provide personalized help to students in one-on-one tutoring settings as well as helpful prompts to encourage collaboration between students in settings with multiple children.
Selected Publications
Ramachandran, A., Strohkorb Sebo, S., & Scassellati, B. (2019). Personalized Robot Tutoring Using the Assistive Tutor POMDP (AT-POMDP) . In Proceedings of the AAAI Conference on Artificial Intelligence (AAAI 2019) .
Strohkorb, S., Fukuto, E., Warren, N., Taylor, C., Berry, B., & Scassellati, B. (2016). Improving Human-Human Collaboration between Children with a Social Robot. In Proceedings of the 2016 IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN 2016).